2015년도에 만들면서 정리하던 자료임
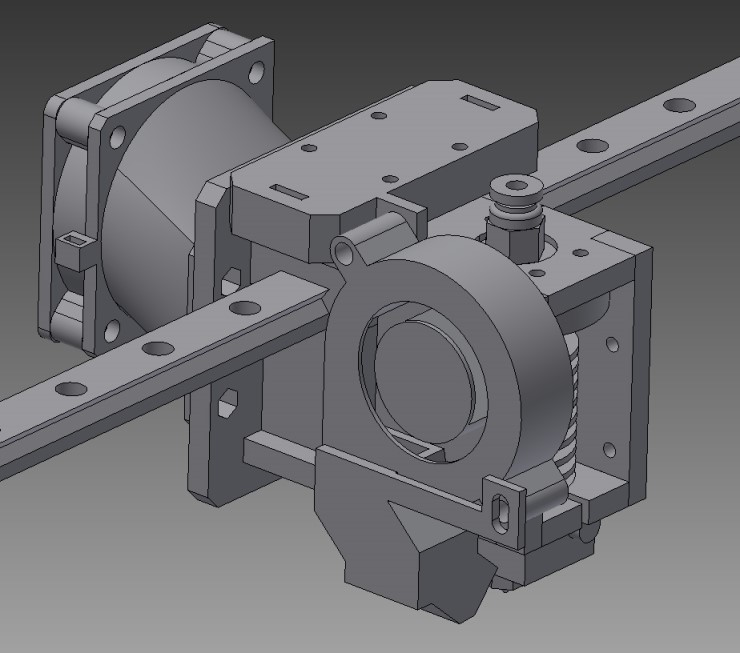
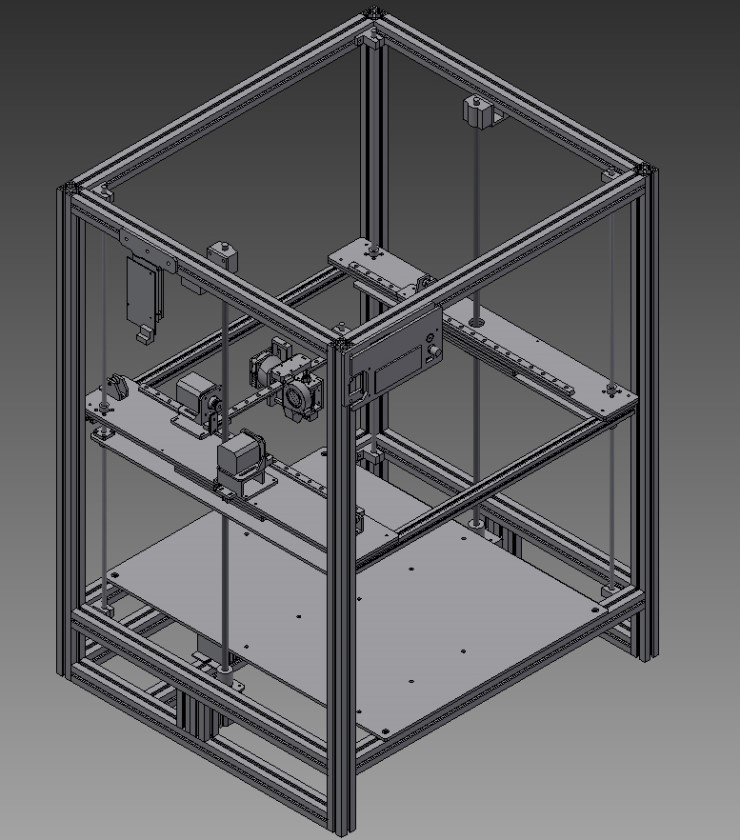
지금 만들고 있는 3D 프린터 대략적(이라 쓰고 심혈을 기울였다고 읽는다!) 모습은 아래 그림
원래 인벤터 프로그램 공부용으로 시작했다가 이런 저런 이유(?)로 실제 만들기에 이르러 결국 인벤터는 이제 잘 보지도(사용은 하지만 초보자 수준에서 깨작거림 ㅋㅋ) 않는 주객이 전도된 상황이 되어버린 슬픈 후문이… 또르르르
기계나 전기나 다 모르는 상황에서 시작해 결국 여기까지 왔다는데 의의를 두고 있음
그래도 직접 설계해서 만든 후 실제 가동해보는게 뭐 그리 나쁜것은 아닌듯 하다. 뭐 투자되는 시간, 금액, 노력들이 좀 과해서 문제이긴 하지만 말이다.
주요 재원
프레임 크기 : 610 ㎜ × 680 ㎜ × 900 ㎜
출력 가능 예상 크기 : 350 ㎜ × 350 ㎜ × 600 ㎜
파워 : SMPS 600W 12V
모터 : Smart Automation SM42HT47-1684A (NEMA 17, Step Angle 1.8 degree, 2.8V, 1.68A, Holdig Torque 4,400 g㎝) – 4EA (+1??)
제어보드 : 아두이노 메가 2580 + Ramps 1.4, 홀센서 (X축, Y축), Optical 센서(Z축)
LM 가이드 : MR12ML 블럭 + MR12-470L – 3EA
히터보드 : MK2B 히터 배드 – 4EA
기타 : 연마봉 8Φ 800 ㎜ – 4EA, TM스크류 TMR10-800 + TM 스크류 ATM 10 이면 플랜지너트, 리니어 볼부싱 사각플랜지형 LMK8UU – 6EA (+2??), 623ZZ 베어링, 624ZZ 베어링 – 10 EA, F5-12M 스러스트 베어링, SK8 연마봉 서포트 – 8EA, 브로워 팬, 커플링 Set, 릴레이 SDD0-230N, 방열판, 프로파일 외
홀 센서 테스트 : X, Y 축 용
주의사항 : 자석 N극 S극 방향성이 있음, 인식방향이 있으므로 자석의 방향 주의할 것 (뒤집어서 달면 인식 안됨)
참조 : 아날로그 신호 핀이 있어서 거리에 따른 자성세기의 아날로그 값을 기대했으나 디지털 값과 같이 on/off 밖에 안됨
2. Optical 센서 테스트 : Z 축용 (Z축은 원점 잡기가 애매할거 같아서 이넘으로 선택)
주의사항 : 핀연결시 V-전원, S-신호, G-ground 순서임
3. 히터 보드 예상 결선도
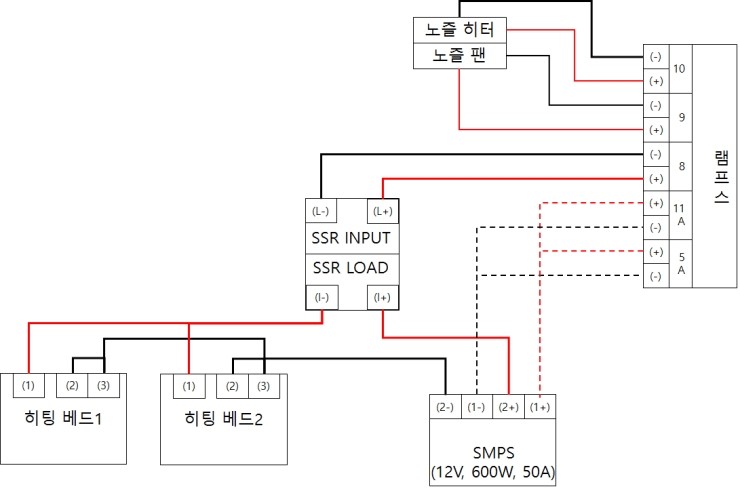
이넘은 테스트를 해봐야 알거 같음 ㅋㅋㅋㅋㅋㅋ (전기는 왠지 겁나서 건드리기가 부담스럽.. 왠지 확 감전되거나 태워먹거나 할것같은 불안감이 많음)
RAMPS 보드 전기 부하를 줄이기 위해서(원래 히팅베드 한개만 연결되도록 설계된거라 2개 이상 연결하면 과부하로 타버릴듯) SSR을 이용해 다량의 전원은 이쪽으로 유입시키고 컨트롤만 보드쪽으로 돌리는게 목적
릴레이가 30A 짜리이고, 릴레이 두개 써서 베드 4개를 연결할까 싶은데.. 중요한건 파워가 50A라는게.. 왜 25A짜리는 해외에서만 파냐고..(비싸기도 비싸고)
그리고 또 문제가.. Z 축 흔들리면 안되는데.. 흙 ㅜㅜ 아 그러기전에 Z축 모터가 들어 올릴 수 있을까? ㅜㅜ 으헝헝헝헝